Der Basic Track richtet sich an Gymnasiasten. In dem Datenanalyse-Wettbewerb der Cognitive Systems Lab (CSL), Zentrum für angewandte Raumfahrttechnologie und Mikrogravitation (ZARM) und dem Fraunhofer-Institut für digitale Medizin (MEVIS) der Universität Bremen messen sich Teilnehmende um Preisgelder bis 1.500 Euro, und attraktive Sachpreise.
Preisverleihung des Basic Track der Bremen Big Data Challenge 2025 zeichnet junge Programmiertalente aus. Mehr lesen
MEVIS-Track Challenge
ZARM-Track Challenge
CSL Track Challenge
MEVIS-Track Challenge
MEVIS-Track Challenge
Die Zukunft der Medizin ist digital, und das ist auch wichtig! Ärzt:innen werden in ihrem Arbeitsalltag mit einer Flut von Daten konfrontiert aus denen sie eine Diagnose, eine Behandlungsplanung und eine individuelle Prognose für ihre Patent:innen ableiten müssen. Um mit dieser Datenmenge besser umgehen zu können, kann KI helfen. Die Aufgabe des MEVIS zeigt anhand des Krankheitsbilds „Herzinfakt“, wie eine KI dabei hilft die Daten zu verarbeiten und die Arbeit der Ärzt:innen erleichtert. Aber auch die Grenzen der Vorhersagen und Prognosen sollen gut überlegt werden.
Submission Deadlines:
MEVIS-Challenge Part 1 : 06.11.2024
MEVIS-Challenge Part 2 : 19.01.2025
Aufgabenstellung
Load the data from the CSV file and analyze it. You will notice that some datasets are incomplete. However, an AI can only be trained on complete data. How do you handle missing information?
Define an appropriate train/validation split.
Challenge Part 1: Train a random forest model to predict whether any complication will occur after a heart attack, without differentiating the type of complication. You may use existing routines from freely available Python packages.
Challenge Part 2: Train a random forest or any other freely available AI model to predict the specific complications. In this case, the model should explicitly indicate which complication(s) are likely to occur.
Challenge your AI! – Testing:
Save the predictions of your AI for the validation dataset as a CSV file named "Prognosen.csv." Each row should represent a patient, and each column should correspond to a specific complication. If a complication occurs, a "1" should be entered in the respective column, following the format of the provided training and test data. The first row of the CSV file should contain the column names. An example format can be found in the file "Beispiel-Ergebnisse.csv."
Please upload your "Prognosen.csv" file here to receive your score. The maximum score is 1.0, and the minimum is 0.0. The score indicates the percentage of patients for whom your predictions are correct.
Not satisfied with your result, or others are scoring higher? Then tune your AI and give it another try!
Notes (Please Note):
Challenge Part 1: For the evaluation of Part 1, only the last collumn of your submitted results table will be used. Therefore, all other columns may remain empty in this case.
Challenge Part 2: For the evaluation of Part 2, all collumns of your submitted results table will be used. Therefore, the last column should also be filled according to your predictions.
Sending humans to Mars and exploring our red neighboring planet has long been a dream of space exploration. However, Mars differs from Earth in many ways. The lack of atmosphere, absence of liquid water, and high radiation levels currently make it impossible to send a crew on such a journey. Instead, Mars rovers are used, but even they face numerous challenges on the Martian surface, with no direct intervention possible from Earth. When the first humans step onto Mars in a few years, additional difficulties will arise. One of these is the scarcity of resources, which must be brought from Earth and carefully utilized and recycled on Mars.
To address the wide range of challenges presented by a Mars mission (with or without humans), ZARM is offering two tasks for the 2024/25 Challenge.
Submission Deadlines:
Final Parkour: 10.01.2025
Final Labtest: 16.01.2025
The final submission date for both tasks is January 19, 2025.
Aufgabenstellung
Task 1 – Stress on Mars:
Using a CAD program, design a small rover (maximum dimensions of 30 cm in length, width, and height) capable of completing the following tasks:
Navigate slopes of 5%, 10%, and 15%, both ascending and descending
Drive despite headwinds and crosswinds
Drive on smooth surfaces, sand, and gravel
Drive while carrying a load of 100g, 300g, and 500g
Als Antrieb erhaltet ihr zum Kick Off die Motoren und den Brick von Lego Spike Prime.
Dokumentiert euren Arbeitsprozess und stellt dar wie ihr bei der Lösungsfindung vorgegangen seid.
Task 2 – Life Support System:
Build a water recycling system capable of purifying a liquid provided by ZARM as effectively as possible, making it reusable.
Create a project outline. Identify the types of contaminants in the water. How can these be removed? In what sequence should the recycling process occur? What materials do we need?
Conduct initial tests at home or at school and create a list of all required materials. Send this list by November 17, 2024, to Challenge@zarm.uni-bremen.de. The material list should include all items, materials, and chemicals you need.
Build the recycling system together with ZARM in the lab and test your idea.
Document your work process and outline how you approached finding the solution.
ZARM – Track Leaderboard (Final)
Place 1 2 3 >3
Gruppen vier gewinnt die Füsiker, Biodual die guten Physiker Rübe, Q.E.D.C, Orbit Breaker, Valamj, die Gutesten
Everyday life is increasingly shaped by digital technologies, with smartphones playing a central role. They have become versatile and convenient companions that can be taken and used anywhere. A fascinating aspect of modern smartphones lies in the variety of integrated sensors, which often go unnoticed. However, these sensors perform crucial tasks and significantly enhance the usability of the device.
As part of this challenge, the focus is on motion detection using sensors. Particularly noteworthy is the IMU (Inertial Measurement Unit) which consists of an accelerometer that captures acceleration in three dimensions and a gyroscope , which measures rotational speed. The goal of this challenge is to classify the following simple motion patterns using recorded sensor data with a smartphone in hand:
stand
Gehen
falling (smartphone)
jump two times
jump 3 times
rotation left
rotation right
3 squats
walk left
walk right
walk zigzag pattern
going up the stairs
Fristen
Test data will be distributed on January 15, 2025. 15.01.2025 verschickt.
Leaderboard submissions are possible from January 15, 2025, to February 21, 2025. A total of 3 submissions are available per week. 15.01.2025 – 21.02.2025 möglich.
Pro Woche stehen insgesamt 3 Einreichungen zur Verfügung.
Aufgabenstellung
Phase 1 – Data Collection:
In the first phase, the task is to collect sufficient raw data for the first three motion classes presented. ("Standing," "Walking," "Dropping") using a smartphone. The data collection process should be designed to be as strategic and efficient as possible to minimize or completely avoid the effort required for subsequent data annotation (see additional notes below).
A suitable sensor app from the Play Store or Apple App Store can be used for data collection.
It is necessary to develop a concept in advance that outlines how the data collection can be optimally conducted.
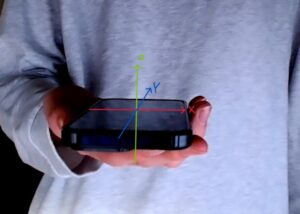
To simplify the process, data collection with the smartphone should be conducted exclusively in the following position: the screen (z-axis) faces upward, and the smartphone lies flat on the hand (see photo).
Pay attention to all the notes mentioned below during the recording to ensure the data remains usable for the challenge.
At least 20 experiments should be conducted per class, providing a total of 60 experiments as the basis for training. Each experiment should last approximately 10 seconds, with a permissible time deviation of -1 to +1 seconds.
Use a sampling rate of 500 Hz for all recordings.
The collected data should be plotted in a suitable environment and evaluated for usability.
Subsequently, a dataset should be prepared for use in the classification task. The dataset will be sent to the respective supervisor, who will then evaluate it for usability.
Phase 2 – Machine Learning:
After completing the data collection, the development of a model for classifying motion patterns begins as soon as the self-recorded data (classes 1-3) have been verified for accuracy and the remaining data (classes 4-12) have been made available.
The remaining training data will be sent by your assistant.
For training, an aggregated dataset must be created. Identify suitable features for classification in the process.
Choose a classification method.
The selected model should be trained to recognize the respective classes based on the data.
After training, you can evaluate the performance of the selected features and the model using the provided test data. Classify the test data with your model and upload the completed file (.csv) to the leaderboard to assess your model's accuracy.
Safety Notice!
The experiments should be conducted in a safe environment such as at home or in a designated laboratory. It is essential to secure the surroundings to prevent injuries to yourself or others.
Recording Notice:
When collecting data for the "Dropping the Smartphone" class, ensure that the smartphone does not fall onto a hard surface ❌. The surface should be soft, such as a mattress ✅, to safely cushion the fall and prevent damage to the smartphone. The smartphone must not be thrown with force ❌, instead, it should be released from the hand without any additional motion ✅, falling straight downward.
To obtain usable data for walking, the speed during an experiment should remain constant. Additionally, ensure that the movement is neither too slow nor too fast, as this could negatively impact the classification.
During data collection, please note that on iOS devices, the axes may be inverted. This challenge follows the conventions of Android .
Pay attention to the correct positioning of the smartphone during data collection, as shown in the photo (applies to all classes).
Classificationtask/Leaderboard Notice:
Please note that the purpose of this competition is to learn how computers can automatically read, process, and recognize large datasets through training artificial intelligence. The result.csv file should either be automatically generated by the program after recognition or the recognition results should be printed by the program and then manually copied into the file. In principle, we do not accept results that are merely analyzed and 'written' by humans (instead of results achieved through training with Python code). If you achieve a prize-worthy ranking but cannot provide executable code that automatically generates results for artificial intelligence, we reserve the right to cancel your results and ranking.
Die Zukunft der Medizin ist digital, und das ist auch wichtig! Ärzt:innen werden in ihrem Arbeitsalltag mit einer Flut von Daten konfrontiert aus denen sie eine Diagnose, eine Behandlungsplanung und eine individuelle Prognose für ihre Patent:innen ableiten müssen. Um mit dieser Datenmenge besser umgehen zu können, kann KI helfen. Die Aufgabe des MEVIS zeigt anhand des Krankheitsbilds „Herzinfakt“, wie eine KI dabei hilft die Daten zu verarbeiten und die Arbeit der Ärzt:innen erleichtert. Aber auch die Grenzen der Vorhersagen und Prognosen sollen gut überlegt werden.
Submission Deadlines:
MEVIS-Challenge Part 1 : 06.11.2024
MEVIS-Challenge Part 2 : 19.01.2025
Aufgabenstellung
Load the data from the CSV file and analyze it. You will notice that some datasets are incomplete. However, an AI can only be trained on complete data. How do you handle missing information?
Define an appropriate train/validation split.
Challenge Part 1: Train a random forest model to predict whether any complication will occur after a heart attack, without differentiating the type of complication. You may use existing routines from freely available Python packages.
Challenge Part 2: Train a random forest or any other freely available AI model to predict the specific complications. In this case, the model should explicitly indicate which complication(s) are likely to occur.
Challenge your AI! – Testing:
Save the predictions of your AI for the validation dataset as a CSV file named "Prognosen.csv." Each row should represent a patient, and each column should correspond to a specific complication. If a complication occurs, a "1" should be entered in the respective column, following the format of the provided training and test data. The first row of the CSV file should contain the column names. An example format can be found in the file "Beispiel-Ergebnisse.csv."
Please upload your "Prognosen.csv" file here to receive your score. The maximum score is 1.0, and the minimum is 0.0. The score indicates the percentage of patients for whom your predictions are correct.
Not satisfied with your result, or others are scoring higher? Then tune your AI and give it another try!
Notes (Please Note):
Challenge Part 1: For the evaluation of Part 1, only the last collumn of your submitted results table will be used. Therefore, all other columns may remain empty in this case.
Challenge Part 2: For the evaluation of Part 2, all collumns of your submitted results table will be used. Therefore, the last column should also be filled according to your predictions.
Everyday life is increasingly shaped by digital technologies, with smartphones playing a central role. They have become versatile and convenient companions that can be taken and used anywhere. A fascinating aspect of modern smartphones lies in the variety of integrated sensors, which often go unnoticed. However, these sensors perform crucial tasks and significantly enhance the usability of the device.
As part of this challenge, the focus is on motion detection using sensors. Particularly noteworthy is the IMU (Inertial Measurement Unit) which consists of an accelerometer that captures acceleration in three dimensions and a gyroscope , which measures rotational speed. The goal of this challenge is to classify the following simple motion patterns using recorded sensor data with a smartphone in hand:
stand
Gehen
falling (smartphone)
jump two times
jump 3 times
rotation left
rotation right
3 squats
walk left
walk right
walk zigzag pattern
going up the stairs
Fristen
Test data will be distributed on January 15, 2025. 15.01.2025 verschickt.
Leaderboard submissions are possible from January 15, 2025, to February 21, 2025. A total of 3 submissions are available per week. 15.01.2025 – 21.02.2025 möglich.
Pro Woche stehen insgesamt 3 Einreichungen zur Verfügung.
Aufgabenstellung
Phase 1 – Data Collection:
In the first phase, the task is to collect sufficient raw data for the first three motion classes presented. ("Standing," "Walking," "Dropping") using a smartphone. The data collection process should be designed to be as strategic and efficient as possible to minimize or completely avoid the effort required for subsequent data annotation (see additional notes below).
A suitable sensor app from the Play Store or Apple App Store can be used for data collection.
It is necessary to develop a concept in advance that outlines how the data collection can be optimally conducted.
To simplify the process, data collection with the smartphone should be conducted exclusively in the following position: the screen (z-axis) faces upward, and the smartphone lies flat on the hand (see photo).
Pay attention to all the notes mentioned below during the recording to ensure the data remains usable for the challenge.
At least 20 experiments should be conducted per class, providing a total of 60 experiments as the basis for training. Each experiment should last approximately 10 seconds, with a permissible time deviation of -1 to +1 seconds.
Use a sampling rate of 500 Hz for all recordings.
The collected data should be plotted in a suitable environment and evaluated for usability.
Subsequently, a dataset should be prepared for use in the classification task. The dataset will be sent to the respective supervisor, who will then evaluate it for usability.
Phase 2 – Machine Learning:
After completing the data collection, the development of a model for classifying motion patterns begins as soon as the self-recorded data (classes 1-3) have been verified for accuracy and the remaining data (classes 4-12) have been made available.
The remaining training data will be sent by your assistant.
For training, an aggregated dataset must be created. Identify suitable features for classification in the process.
Choose a classification method.
The selected model should be trained to recognize the respective classes based on the data.
After training, you can evaluate the performance of the selected features and the model using the provided test data. Classify the test data with your model and upload the completed file (.csv) to the leaderboard to assess your model's accuracy.
Safety Notice!
The experiments should be conducted in a safe environment such as at home or in a designated laboratory. It is essential to secure the surroundings to prevent injuries to yourself or others.
Recording Notice:
When collecting data for the "Dropping the Smartphone" class, ensure that the smartphone does not fall onto a hard surface ❌. The surface should be soft, such as a mattress ✅, to safely cushion the fall and prevent damage to the smartphone. The smartphone must not be thrown with force ❌, instead, it should be released from the hand without any additional motion ✅, falling straight downward.
To obtain usable data for walking, the speed during an experiment should remain constant. Additionally, ensure that the movement is neither too slow nor too fast, as this could negatively impact the classification.
During data collection, please note that on iOS devices, the axes may be inverted. This challenge follows the conventions of Android .
Pay attention to the correct positioning of the smartphone during data collection, as shown in the photo (applies to all classes).
Classificationtask/Leaderboard Notice:
Please note that the purpose of this competition is to learn how computers can automatically read, process, and recognize large datasets through training artificial intelligence. The result.csv file should either be automatically generated by the program after recognition or the recognition results should be printed by the program and then manually copied into the file. In principle, we do not accept results that are merely analyzed and 'written' by humans (instead of results achieved through training with Python code). If you achieve a prize-worthy ranking but cannot provide executable code that automatically generates results for artificial intelligence, we reserve the right to cancel your results and ranking.
Everyday life is increasingly shaped by digital technologies, with smartphones playing a central role. They have become versatile and convenient companions that can be taken and used anywhere. A fascinating aspect of modern smartphones lies in the variety of integrated sensors, which often go unnoticed. However, these sensors perform crucial tasks and significantly enhance the usability of the device.
As part of this challenge, the focus is on motion detection using sensors. Particularly noteworthy is the IMU (Inertial Measurement Unit) which consists of an accelerometer that captures acceleration in three dimensions and a gyroscope , which measures rotational speed. The goal of this challenge is to classify the following simple motion patterns using recorded sensor data with a smartphone in hand:
stand
Gehen
falling (smartphone)
jump two times
jump 3 times
rotation left
rotation right
3 squats
walk left
walk right
walk zigzag pattern
going up the stairs
Fristen
Test data will be distributed on January 15, 2025. 15.01.2025 verschickt.
Leaderboard submissions are possible from January 15, 2025, to February 21, 2025. A total of 3 submissions are available per week. 15.01.2025 – 21.02.2025 möglich.
Pro Woche stehen insgesamt 3 Einreichungen zur Verfügung.
Aufgabenstellung
Phase 1 – Data Collection:
In the first phase, the task is to collect sufficient raw data for the first three motion classes presented. ("Standing," "Walking," "Dropping") using a smartphone. The data collection process should be designed to be as strategic and efficient as possible to minimize or completely avoid the effort required for subsequent data annotation (see additional notes below).
A suitable sensor app from the Play Store or Apple App Store can be used for data collection.
It is necessary to develop a concept in advance that outlines how the data collection can be optimally conducted.
To simplify the process, data collection with the smartphone should be conducted exclusively in the following position: the screen (z-axis) faces upward, and the smartphone lies flat on the hand (see photo).
Pay attention to all the notes mentioned below during the recording to ensure the data remains usable for the challenge.
At least 20 experiments should be conducted per class, providing a total of 60 experiments as the basis for training. Each experiment should last approximately 10 seconds, with a permissible time deviation of -1 to +1 seconds.
Use a sampling rate of 500 Hz for all recordings.
The collected data should be plotted in a suitable environment and evaluated for usability.
Subsequently, a dataset should be prepared for use in the classification task. The dataset will be sent to the respective supervisor, who will then evaluate it for usability.
Phase 2 – Machine Learning:
After completing the data collection, the development of a model for classifying motion patterns begins as soon as the self-recorded data (classes 1-3) have been verified for accuracy and the remaining data (classes 4-12) have been made available.
The remaining training data will be sent by your assistant.
For training, an aggregated dataset must be created. Identify suitable features for classification in the process.
Choose a classification method.
The selected model should be trained to recognize the respective classes based on the data.
After training, you can evaluate the performance of the selected features and the model using the provided test data. Classify the test data with your model and upload the completed file (.csv) to the leaderboard to assess your model's accuracy.
Safety Notice!
The experiments should be conducted in a safe environment such as at home or in a designated laboratory. It is essential to secure the surroundings to prevent injuries to yourself or others.
Recording Notice:
When collecting data for the "Dropping the Smartphone" class, ensure that the smartphone does not fall onto a hard surface ❌. The surface should be soft, such as a mattress ✅, to safely cushion the fall and prevent damage to the smartphone. The smartphone must not be thrown with force ❌, instead, it should be released from the hand without any additional motion ✅, falling straight downward.
To obtain usable data for walking, the speed during an experiment should remain constant. Additionally, ensure that the movement is neither too slow nor too fast, as this could negatively impact the classification.
During data collection, please note that on iOS devices, the axes may be inverted. This challenge follows the conventions of Android .
Pay attention to the correct positioning of the smartphone during data collection, as shown in the photo (applies to all classes).
Classificationtask/Leaderboard Notice:
Please note that the purpose of this competition is to learn how computers can automatically read, process, and recognize large datasets through training artificial intelligence. The result.csv file should either be automatically generated by the program after recognition or the recognition results should be printed by the program and then manually copied into the file. In principle, we do not accept results that are merely analyzed and 'written' by humans (instead of results achieved through training with Python code). If you achieve a prize-worthy ranking but cannot provide executable code that automatically generates results for artificial intelligence, we reserve the right to cancel your results and ranking.